VPL version 1 to 1.6
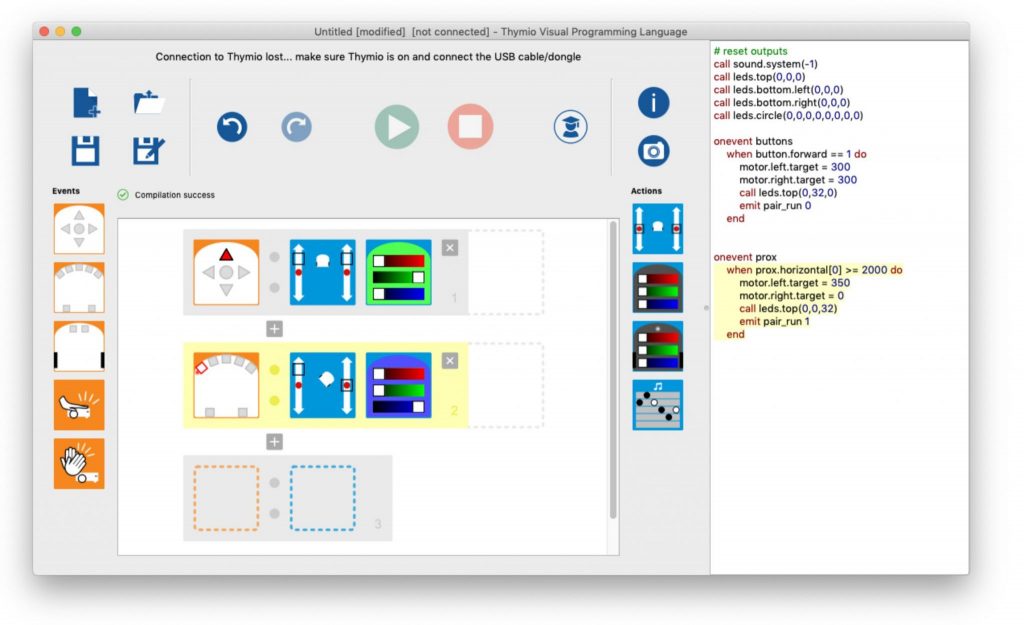
The first version of VPL was developed by Dr. Jiwon Shin and Dr. Stéphane Magnenat at ETH Zürich [1,6]. It consisted in a graphic layer on top of the ASEBA programming environment, facilitating the developement of simple behaviors. The interface offered the choice between a basic mode, with the simplest icons, and an advanced mode with more programming possibilities, including states, timers and configurable thresholds. The user could have a look at the Aseba code generated and continue programming from that code.
The latest version is included in Thymio Suite.
VPL version 2
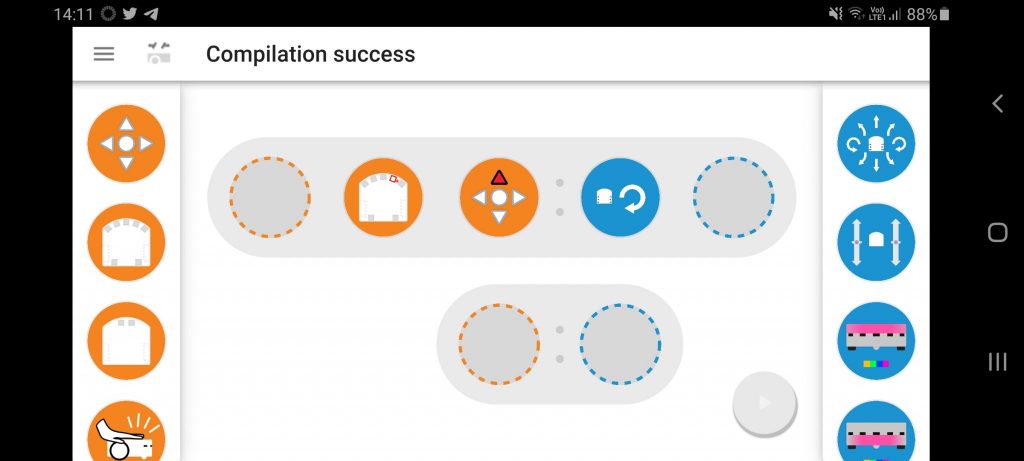
This second version of VPL was developed for tablets by Dr. Stéphane Magnenat and Martin Voelkle, with graphic design by Maria María Beltrán, and a version has been made available for Android. The design was made more attractive and combining multiple events was introduced.
VPL version 3
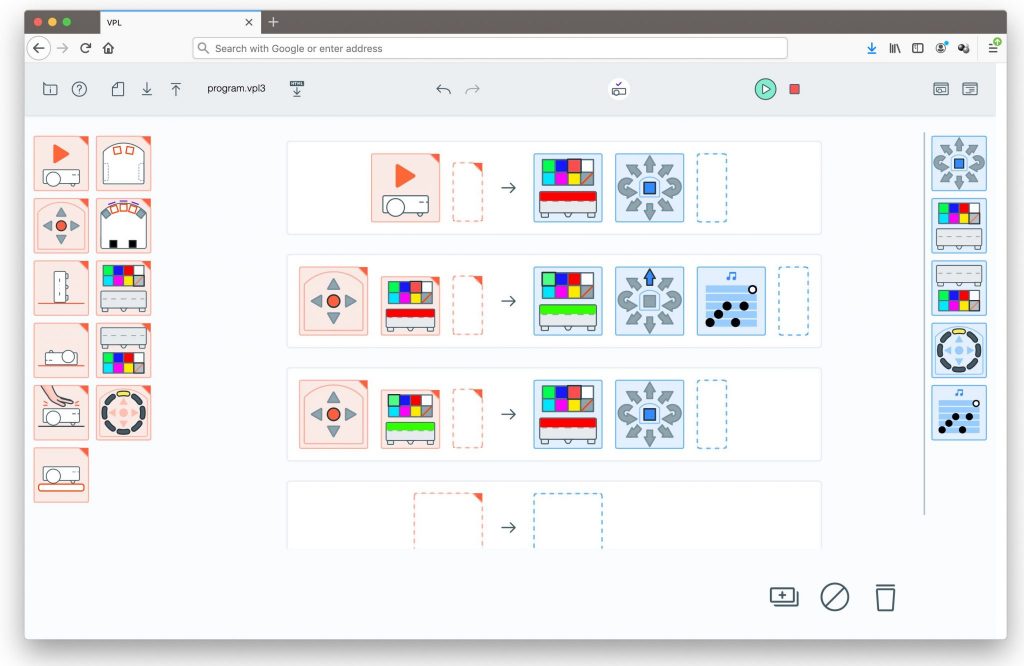
This third version of VPL has been completely rewritten by Dr. Yves Piguet, with graphic design by Maria María Beltrán. This new application is Web-based, enabling deployment on any device, including tablets. The concept has been revisited with simpler icons which can be chosen by the user or the teacher from a larger set, events complemented with conditions, and support for internal states such as LED colors and for counters.
The latest version is included in Thymio Suite.
Selected publications related to VPL
| [1] | Jiwon Shin, Roland Siegwart, and Stéphane Magnenat. Visual programming language for Thymio II robot. In Conference on Interaction Design and Children (IDC’14), Aarhus, Denmark, June 17–20 2014. [ bib | DOI ] |
| [2] | Fanny Riedo, Morgane Chevalier, Stéphane Magnenat, and Francesco Mondada. Thymio II, a robot that grows wiser with children. In 2013 IEEE Workshop on Advanced Robotics and its Social Impacts, pages 187-193. IEEE, 2013. [ bib | DOI ] |
| [3] | Francesco Mondada, Michael Bonani, Fanny Riedo, Manon Briod, Léa Pereyre, Philippe Rétornaz, and Stéphane Magnenat. Bringing robotics to formal education: The Thymio open-source hardware robot. IEEE Robotics & Automation Magazine, 24(1):77-85, 2017. [ bib | DOI ] |
| [4] | Andrea Mussati, Christian Giang, Alberto Piatti, and Francesco Mondada. A tangible programming language for the educational robot Thymio. In 2019 10th International Conference on Information, Intelligence, Systems and Applications (IISA), pages 1-4. IEEE, 2019. [ bib | DOI ] |
| [5] | Morgane Chevalier, Fanny Riedo, and Francesco Mondada. Pedagogical uses of Thymio II: How do teachers perceive educational robots in formal education? IEEE Robotics & Automation Magazine, 23(2):16-23, 2016. [ bib | DOI ] |
| [6] | Stéphane Magnenat, Jiwon Shin, Fanny Riedo, Roland Siegwart, and Morderchai Ben-Ari. Teaching a core CS concept through robotics. In Proceedings of the 2014 conference on Innovation & technology in computer science education, pages 315-320, 2014. [ bib | DOI ] |